Ritesh Sharma, PhD



Research Scientist
Department of Electrical & Computer Engineering
Virginia Commonwealth University
Richmond, VA, United States
riteshsharmacs (at) gmail (dot) com
About
I am a Research Scientist in the Department of Electrical and Computer Engineering at
Virginia Commonwealth University. My research is in
reliability-aware autonomy: developing methods that let robots determine when their own
perception and decisions can be trusted. I anchor reliability in classical geometric quantities—observer
geometry, dynamic stability margins, free-space topology—and compose these with machine learning where
it helps, producing uncertainty estimates that are interpretable, verifiable, and deployable on real robotic
systems. My current work spans cooperative multi-UAV tracking, geometry-aware mobile manipulation, and reliability-aware
multi-sensor perception, with applications in robotics and infrastructure-scale 3D reconstruction.
Previously I was a Postdoctoral Research Associate at the Institute for Robotics and Autonomy at the University
of Tulsa and a Postdoctoral Fellow at the Center for Intelligent Infrastructure at Missouri University of Science
and Technology. I received my Ph.D. in Computer Science from the University of California, Merced, advised by
Professor Marcelo Kallmann, where I
developed geometric and algorithmic foundations for multi-agent navigation, formation-aware planning, and
decision-making under uncertainty. I have also held research roles at Amazon Robotics, Dolby Laboratories,
PARC (Xerox), and Passur Aerospace.
Research Collaborators:
Dr. Joshua Schultz (The University of Tulsa),
Dr. Tomer Weiss (New Jersey Institute of Technology).
I am always interested in research collaborations and in working with motivated students. Feel free to reach out.
News
| 06.2026 | My second grant, the VIPC CCF Proof-of-Concept Grant, was awarded, marking another step toward translating my research into real-world solutions. |
| 05.2026 | Paper "Harmonizing Mass-Shooting Databases for Cross-Source Risk Classification" accepted at IEEE IRI 2026. |
| 05.2026 | First commercialization grant proposal was awarded, advancing my research toward real-world impact. |
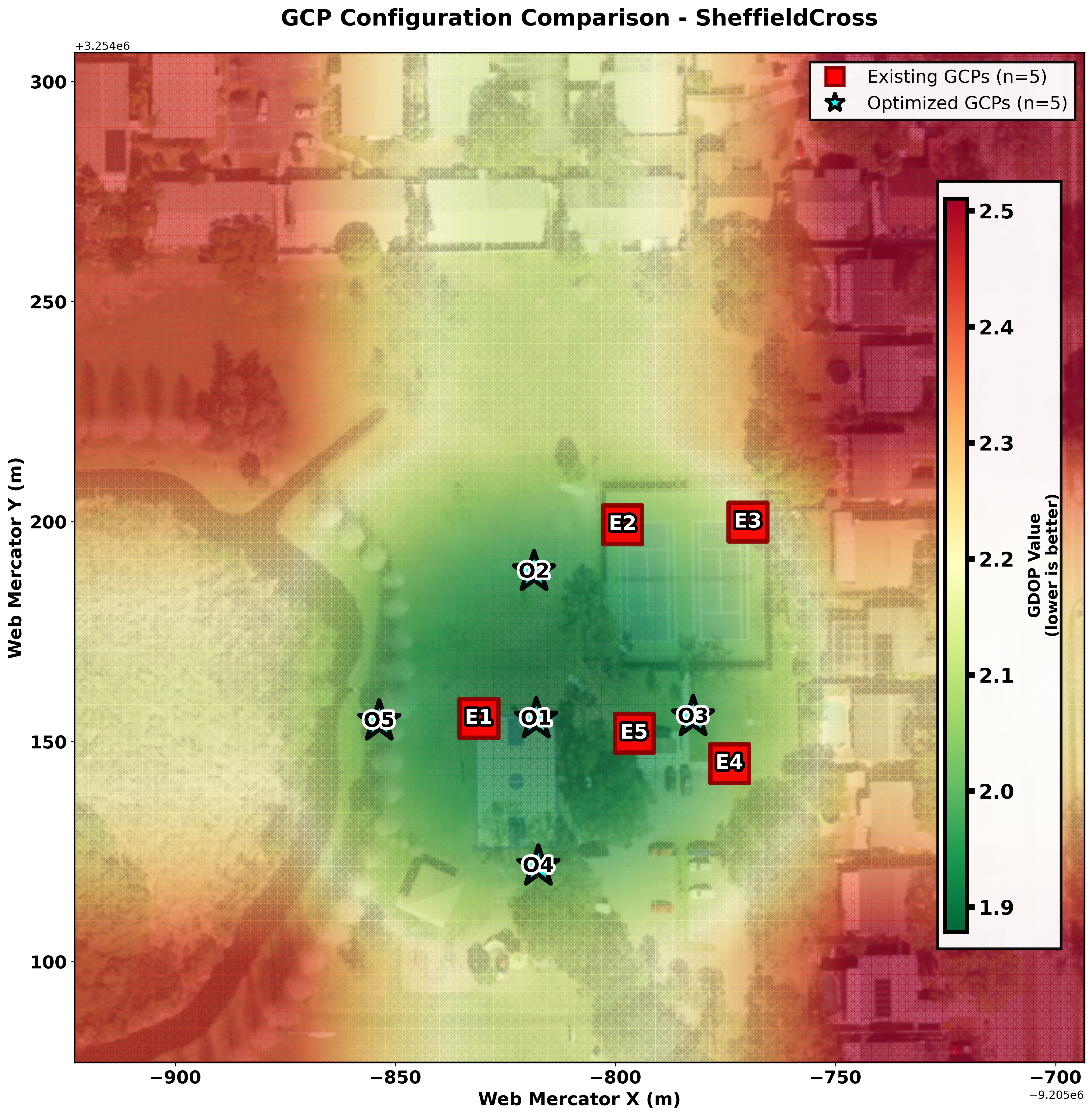
| 03.2026 | Paper "GDOP-Based GCP Optimization for UAV Photogrammetry" accepted at IEEE IGARSS 2026. |
| 01.2026 | My student Shreyas Harish's poster accepted at the National Conference on Undergraduate Research (NCUR) 2026. |
| 07.2025 | Joined VCU as Research Scientist; paper accepted at the International Conference on Social Robotics + AI 2025. |
| See full news archive » | |
Academics
|
|
Doctor of Philosophy in Computer Science, |
|
|
Master of Science in Computer Science, |
|
|
Bachelor of Technology in Computer Science and Engineering, |



Publications
Note: These publications are shared to promote timely access to scholarly work. Copyright remains with the authors and respective holders. Please respect copyright restrictions.
 |
|
|
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
Patent
System and Method for Automatic Floorplan Generation
Inventor: Eric A. Bier & Ritesh Sharma
US Patent App. 18/297,506
Geometry-aware uncertainty calibration for cooperative multi-UAV tracking via GDOP-adaptive EKF noise scheduling.
Inventor: Ritesh Sharma Yuichi Motai
US Patent App. 64/039,821
End-to-end GDOP-based framework for predictive GCP optimization and quality assessment in UAV photogrammetry.
Inventor: Ritesh Sharma Neha Sharma, Shreyas Harish, Colin Drake and Yuchi Motai
US Patent App. 64/070,245