Spatially Distributed Lane Planning for Navigation in 3D Environments
Abstract:
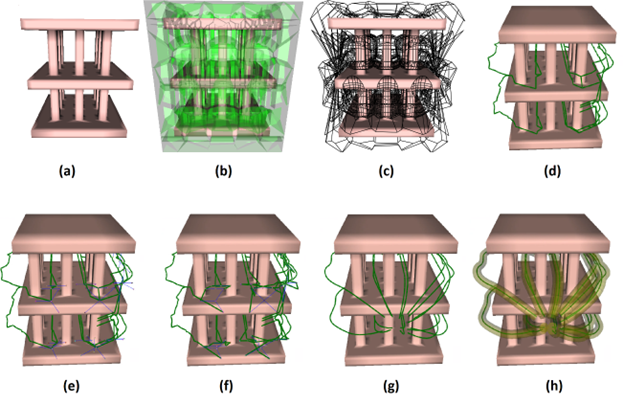
This paper introduces the problem of planning spatially distributed lanes for supporting multi-agent navigation applications in 3D environments. Our proposed approach computes the max-flow of a 3D medial axis representation of the environment in order to globally determine collision-free lanes exploring the entire free space of the volumetric scene. Our method addresses agent clearance and path dispersion in order to provide a comprehensive methodology to globally compute lanes for guiding multiple agents in a 3D environment.
By selecting the desired lane dispersion our approach offers an intuitive and powerful way to explore variations in the computed collections of lanes. Dispersion is addressed with a combination of new techniques based on max flow computation, clearance-based path separation, and adaptive shortcut-based smoothing.
Method overview:
Videos
Paper & supplemental materials:
- Paper PDF (PDF, 0 MB)
- Supplemental materials (PDF, 0 MB)